Démarrage et test des robots
En dehors du mode débogage dans le studio, un robot démarre sur le fichier workflow principal.
Pour définir le workflow principal, faites un clic droit sur le fichier voulu et sélectionnez « Définir comme principal ».

Pour exécuter un projet, sélectionnez la section inférieure du bouton « déboguer le fichier » puis « Exécuter » ou le raccourci Ctrl+F5.
Pour exécuter un projet en mode debug, sélectionnez la section inférieure du bouton « déboguer le fichier » puis « Débogage » ou le raccourci F5.
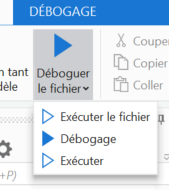
Pour exécuter le fichier en cours, sélectionnez le bouton « Déboguer le fichier » ou le raccourci F6.
Lors de l’exécution du projet en mode debug, l’interface va automatiquement basculer sur le bandeau « Débogage » de l’interface.
Il sera alors possible de mettre en pause ou arrêter manuellement l’exécution du robot avec le panneau supérieur gauche. Lors de la mise en pause, le bloc en cours est mis en surbrillance dans la fenêtre de conception.
Lors de la conception du robot, il est possible de placer des points d’arrêts (raccourci F9) pour interrompre automatiquement le robot. L’interruption aura lieu avant l’exécution de l’activité.
Il sera possible de poursuivre l’exécution du robot avec le bouton « Continuer » ou utiliser les actions de débogages.
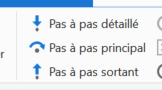
- Pas à pas détaillé (Step into) : permets d’exécuter l’activité suivante.
- Pas à pas principal (Step over) : permets de sauter l’activité en cours.
- Pas à pas sortant (Step out) : permet de sortir du mode pas à pas
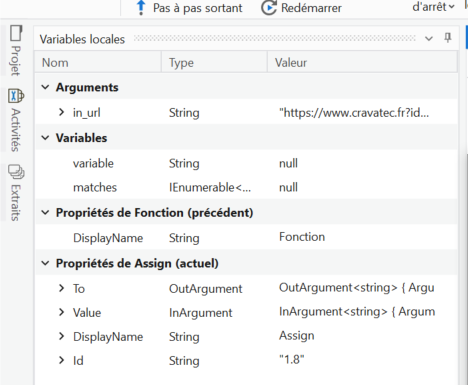
Lorsque l’exécution est interrompue, le panneau « Variables locales » est actif. Il permet de consulter les variables accessibles à l’activité en cours, leur type ainsi que leur valeur.
Il est aussi possible de modifier leur valeur.